If you missed SIGGRAPH 2017 watch a selection of recorded Live Streaming Sessions.

If you missed SIGGRAPH 2017 watch a selection of recorded Live Streaming Sessions.




A method to translate high-level style descriptions, such as “Ming” or “European” for furniture models, into explicit and localized regions over the geometric models that characterize each style.
Ruizhen Hu
Shenzhen University
Wenchao Li
Shenzhen Institute of Advanced Technology
Oliver Van Kaick
Carleton University
Hui Huang
Shenzhen Institute of Advanced Technology
Melinos Averkiou
University of Cyprus
Daniel Cohen-Or
Tel Aviv University
Hao Zhang
Simon Fraser University
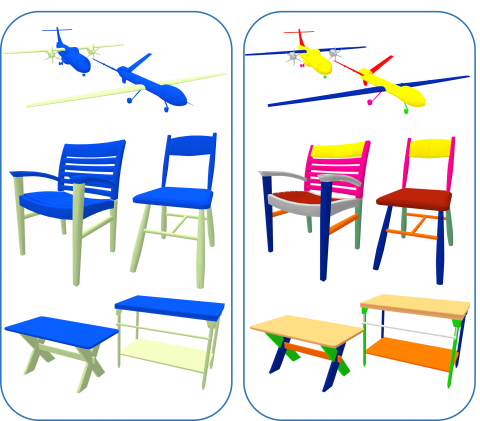
A method for fine-grained, topology-varying part correspondence between two 3D shapes where the core evaluation mechanism only tests global, visual shape similarity.
Chenyang Zhu
Simon Fraser University, National University of Defense Technology
Renjiao Yi
Simon Fraser University, National University of Defense Technology
Wallace Lira
Simon Fraser University
Ibraheem Alhashim
Simon Fraser University
Kai Xu
National University of Defense Technology
Hao Zhang
Simon Fraser University
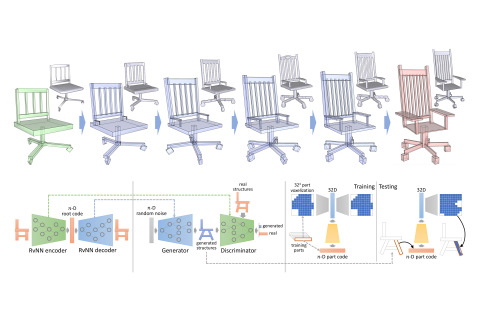
Introducing GRASS (Generative Recursive Autoencoders for Shape Structures), a novel neural network architecture for encoding and synthesis of 3D shapes, particularly their structures.
Jun Li
National University Of Defense Technology
Kai Xu
National University Of Defense Technology
Siddhartha Chaudhuri
Indian Institute of Technology Bombay
Ersin Yumer
Adobe Research
Hao (Richard) Zhang
Simon Fraser University
Leonidas Guibas
Stanford University
This work describes a descriptor-based approach for efficient representation of parametric shapes in a collection, allowing accurate and fast shape-based matching and retrieval.
Adriana Schulz
Massachusetts Institute of Technology, Instituto Nacional de Matemática Pura e Aplicada
Ariel Shamir
Interdisciplinary Center Herzliya
Ilya Baran
Onshape Inc.
David I.W. Levin
University of Toronto
Pitchaya Sitthi-Amorn
Chulalongkorn University
Wojciech Matusik
Massachusetts Institute of Technology

Interactions play a key role in understanding objects and scenes for virtual and real-world agents. This paper introduces a representation for interactions among physical objects that is agnostic to the type of objects or interaction involved.
Sören Pirk
Stanford University
Vojtech Krs
Purdue University
Kaimo Hu
Purdue University
Suren Deepak Rajasekaran
Purdue University
Hao Kang
Purdue University
Bedrich Benes
Purdue University
Yusuke Yoshiyasu
Centre national de la recherche scientifique
Leonidas Guibas
Stanford University


