If you missed SIGGRAPH 2017 watch a selection of recorded Live Streaming Sessions.

If you missed SIGGRAPH 2017 watch a selection of recorded Live Streaming Sessions.



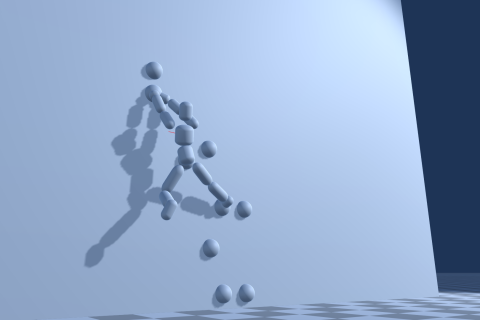
With hierarchical deep reinforcement learning, this work develops a variety of environment-aware locomotion skills for a simulated 3D biped.
Xue Bin Peng
The University of British Columbia
Glen Berseth
The University of British Columbia
KangKang Yin
National University of Singapore
Michiel van de Panne
The University of British Columbia
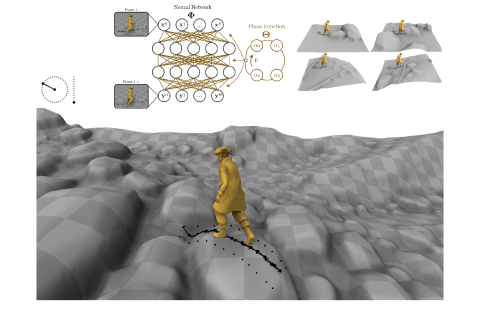
This paper proposes a real-time character control mechanism using a novel phase-functioned neural network that can learn how humans move through complex terrains while avoiding obstacles.
Daniel Holden
University of Edinburgh
Taku Komura
University of Edinburgh
Jun Saito
Method Studios
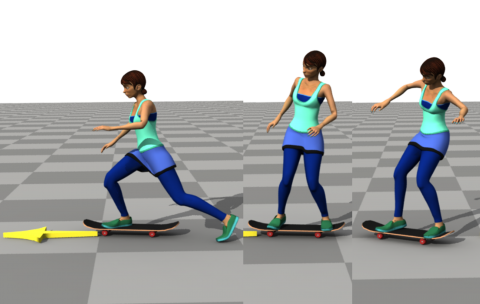
A deep Q-learning-based method for learning a scheduling scheme that reorders short control fragments as necessary at runtime to achieve robust control of challenging skills such as skateboarding.
Libin Liu
Disney Research Pittsburgh
Jessica Hodgins
Carnegie Mellon University
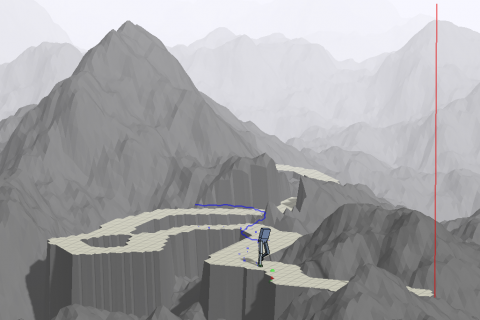
With this path planner and movement optimizer for a simulated humanoid climber, the state of the art is advanced through enabling rich, dynamic movements where more than one limb can move at the same time, and limbs can also hang free for balance, or use the wall around the holds for friction.
Kourosh Naderi
Aalto University
Joose Rajamäki
Aalto University
Perttu Hämäläinen
Aalto University


